目录
- 1 什么是位置感知
- 2 术语历史
- 3 确定位置
- 4 变体
- 5 应用
- ▪ 导航
- ▪ 测量
- ▪ 业务流程
- ▪ 仓库和工艺路线
- ▪ 消费者
- 6 基础设施
- ▪ 本地
- ▪ 区域
- ▪ 全球
- 7 网络位置感知
什么是位置感知
位置感知是指可以被动或主动确定其位置的设备。导航仪器提供船只和车辆的位置坐标。测量设备识别相对于众所周知的位置无线通信设备的位置。
该术语适用于全球,区域或本地范围的导航,实时定位和定位支持。该术语已应用于交通,物流,企业管理和休闲应用。导航系统,定位系统和/或定位服务支持位置感知。没有设备的积极参与的位置感知被称为非合作定位或检测。
术语历史
该术语起源于网络系统和寻址网络实体的配置设置。网络位置感知(NLA)服务收集网络配置和位置信息,并在此信息更改时通知应用程序。随着全球定位系统(GPS)和配备无线电的移动设备的出现,该术语被重新定义为包括以消费者为中心的应用程序。
虽然位置感知是从静态用户位置开始的,但该概念已扩展为反映移动。已经提出了上下文模型,以支持上下文感知的应用程序,这些应用程序使用位置来定制界面,优化与应用程序相关的数据,提高信息检索的精度,发现服务,使用户交互隐式并构建智能环境。例如,位置感知移动电话可以确认其当前在建筑物中。
确定位置
逻辑上的描述使用结构化的文本形式。国际标准化提供了一种使用ISO / TS 16952 的通用方法,该方法源自德国标准DIN EN 61346和DIN EN81346。
用数学术语表示的位置提供了指向指定参考点的坐标。
用网络术语表示的位置与定位网络节点有关。这些包括:
- 根据国际电信联盟 Q系列标准,7号电信信令系统(SS7)和ANSI标准T1.110-通用信息及后续标准的ITU交换线路接入寻址。
- 根据MAC国际标准ISO / IEC 10038 和ISO / IEC 11802 和ANSI / IEEE 版本的IEEE媒体访问寻址。
- 根据URN / UUID国际标准ISO / IEC 11578 和ISO / IEC 9834 和IETF RFC 4122的 ISO过程调用寻址。
变体
通过使用无线信号或光学瞄准镜(可能带有相位角测量),“ Crisp”定位可提供精确的坐标。坐标是相对于标准坐标系(例如WGS84)还是固定对象(例如建筑平面图)。实时定位可及时提供结果,尤其是对于移动目标。实时定位由ISO / IEC 19762-5和ISO / IEC 24730-1定义。模糊定位的精度较低,例如,存在“接近”参考点的位置。测量无线功率电平可以提供这种精度。不太复杂的系统可以使用无线距离测量来估计极坐标中的参考点(距离和方向)与另一个站点的距离。索引位置指示存在于已知位置,例如固定RFID阅读器和RFID标签。
应用
位置感知系统可解决网格中坐标的获取(例如,使用距离度量和填充算法)或至少到参考点的距离(例如,辨别在走廊或建筑物房间中某个扼流点的存在) 。
导航
导航和计算是海员,飞行员和专业驾驶员的主要关注点。任务是动态确定当前位置以及到达目的地的时间,距离和方向。雷达用于区域需求,而NAVSTAR卫星系统用于全球需求。GPS和类似系统已在长途运输操作中变得无所适从,并已成为汽车的标准功能。
测量
测量是导航的静态补充。这对于划定土地所有权以及设计建筑项目的建筑师和土木工程师至关重要。光学测量技术先于激光 三角测量辅助工具。
业务流程
目前位置感知应用到设计创新的过程控制,并且是不可或缺的无处不在和可穿戴计算。在移动设备上,位置感知搜索可以对靠近设备的结果进行优先级排序。相反,设备位置可以透露给其他人,但要付出一些承担者隐私权的代价。
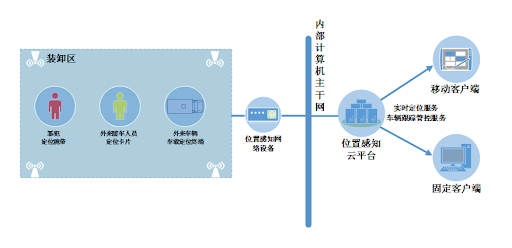
仓库和工艺路线
RFID提供了对象的时间/位置参考,但并不表示对象停留在该位置,这对于限制访问的应用程序(例如跟踪对象进出仓库或在固定路线上移动的对象)就足够了,例如过桥的通行费。
消费者
位置感知功能可为无处不在的计算系统和移动电话提供新的应用程序。此类应用程序包括自动重新配置计算设备以适合当前使用该设备的位置(示例包括ControlPlane和Locamatic),或将用户的位置发布到社交网络的适当成员,并允许零售商将特殊信息发布到靠近零售商的潜在客户。据称,个人可以通过确认当前下落来获得自信心。
基础设施
各国政府已经创建了用于计算位置的全球系统,但存在独立的本地化系统,规模从一栋建筑物到次国家区域不等。
本地
这样的解决方案可以应用实时定位系统(RTLS)和无线个人区域网(WPAN),无线LAN或DECT的概念,并获得专有的平面图或房间号。本地系统随着与本地的距离增加而降级。应用包括自动重新配置计算设备以适合当前使用它的位置。
区域
该方法使用例如移动电话系统(例如3GPP、GSM或LTE),通常以标准化坐标(如WGS84)以标准化格式(例如,美国国家海洋电子协会(NMEA))以室外格式返回信息,或者以引用街道地址的符号坐标返回信息。
全球
这种方法依赖于NAVSTAR当前提供的GPS技术,并且将来可能会采用待定的Galileo系统,通常采用WGS84和NMEA。应用范围包括雪崩救援或紧急救援和山区救援以及搜救(SAR)和战斗搜救(CSAR)。
网络位置感知
网络位置感知(NLA)描述了网络中节点的位置。
